Message portal for production (Flask + SQLite)
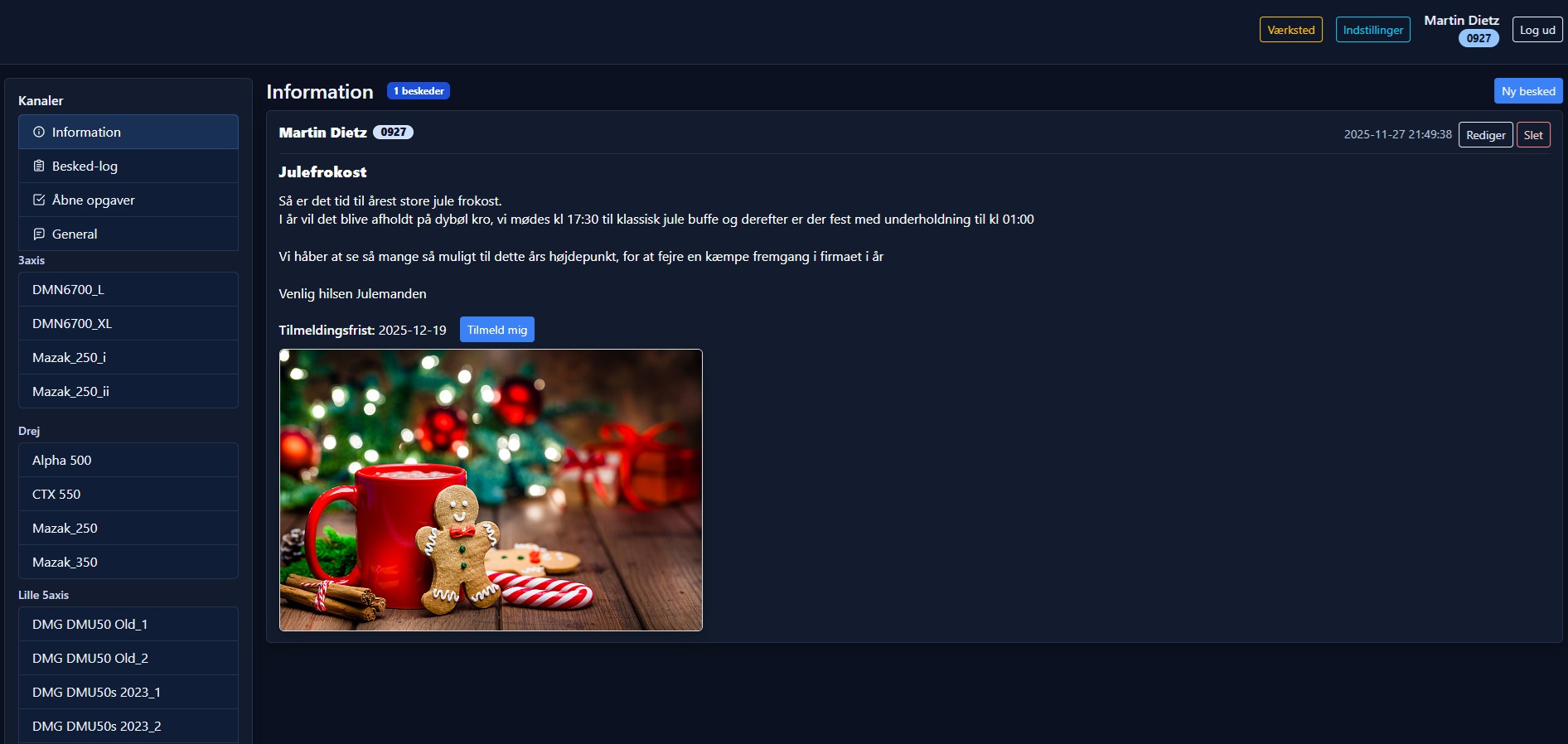
The need was a simple but effective system for messages, tasks and logging – without heavy standard solutions. I built a web-based message portal with login, roles, channels, unread messages, history/versions and image handling. Operators can claim and take over tasks, while management and support get one shared overview.
Result: One central place for messages and tasks – less chaos on whiteboards and post-its and a much clearer overview of who is doing what and when.