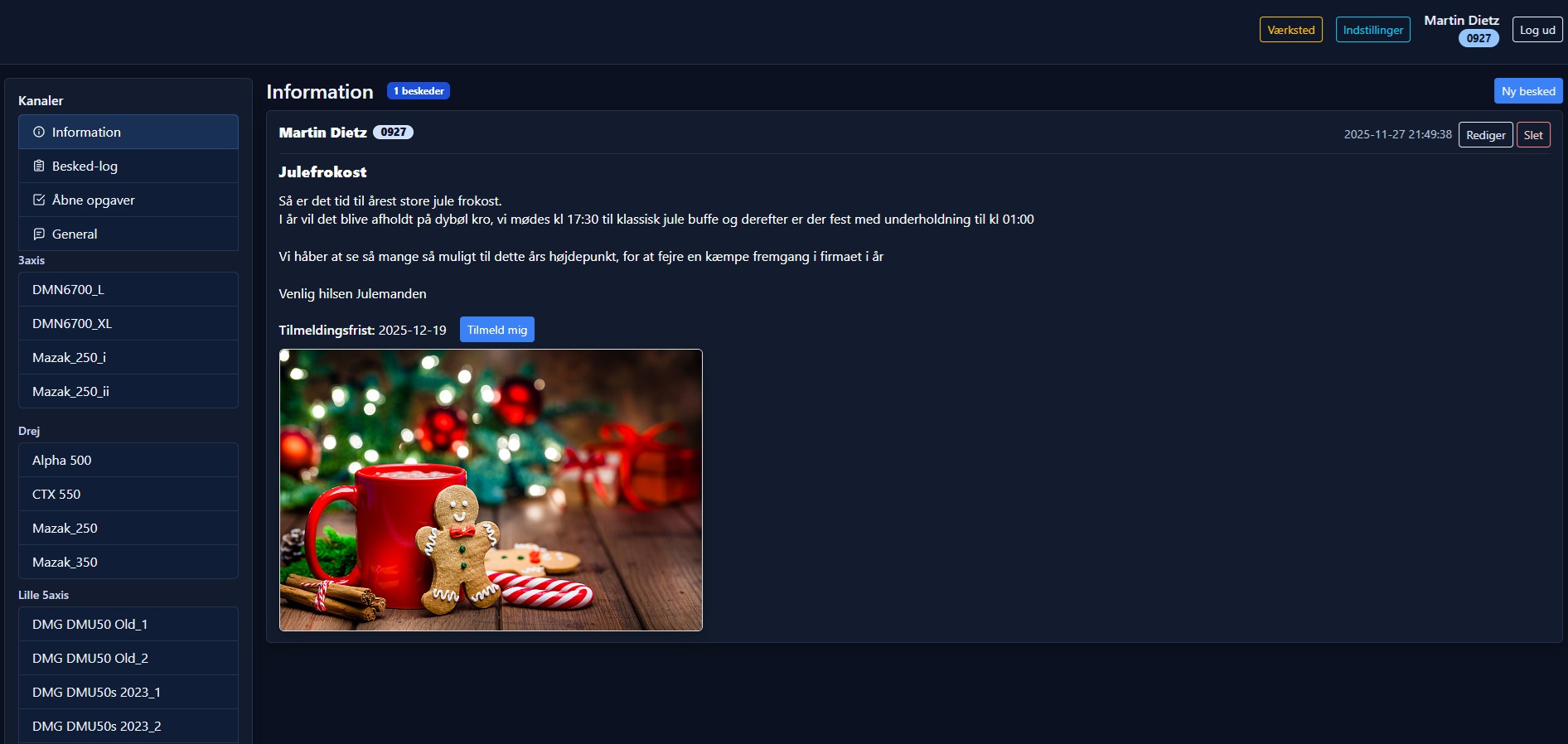
Beskedportal til produktion (Flask + SQLite)
Behovet var et simpelt, men effektivt system til beskeder, opgaver og logning – uden tunge standardløsninger. Jeg udviklede en webbaseret beskedportal med login, roller, kanaler, ulæste beskeder, historik/versioner og billedehåndtering. Operatører kan tage og overtage opgaver, mens ledelse og support har ét samlet overblik.
Resultat: Ét samlet sted til beskeder og opgaver – mindre kaos på whiteboards og post-its og markant bedre overblik over hvem der gør hvad hvornår.